

![1. Write a program called hist_eq which is run as follows: - Asks the user for an image - Opens the image as a grayscale image - Performs histogram equalization - Saves the result as a new image - Then displays the original image and the resulting image The program should apply global histogram equalization to the image. You may assume that the images are 8-bit images (grayscales are in the range [0,255]). Your program should be documented and organized appropriately. Include some images that you tested this on, both the before and afters. Ensure there is variation in intensity.](https://gotit-pro.com/wp-content/uploads/2023/10/608cefe4-cb34-4b5c-a766-9e36719e82ce-300x131.jpg)
Here we have a vacuum cleaning agent that can sense the environment and perform actions to move around and vacuum clean dirty squares. We assume a 5 by 5 grid world known to the agent. The environment is fully observable: the percepts give complete information about the Dirty/Clean status of every square and the agent’s location. The environment is deterministic: A clean square remains clean and a dirty square remains dirty unless the agent cleans it up. The actions available for the agent are: Left, Right, Up, Down, Suck. Each action takes place in one time step. The actions and percepts are perfectly reliable. Each of the actions will incur a cost of 1. At the end of each time step, each remaining dirty square will incur a cost of 2. The agent’s performance is measured by the total cost received from start state to reaching a state with all squares being “Clean”. As usual, a rational agent should maximize its performance score and thus minimize the total cost.
Assume the agent is in square (x, y) at time t, and the square was “dirty” at time t1. Suppose the agent performs the “Suck” action at time t, then square (x, y) will NOT incur cost due to dirtiness at step t (because at the end of this time step, square (x, y) is already clean).
Formulate the vacuum cleaning problem as a search problem. In this sub-problem, you would define the states, actions, the successor function, and the goal test. You can assume the initial state has the top 5 squares all dirty, and the agent is located at the bottom left square. You can index each square in the 5×5 grid world by (x, y) with the bottom left square = (1, 1) and the top right square = (5, 5).
How do you represent a state? Hint: A state S should specify two things:
(a) The dirty/clean status for all 25 squares, AND
(b) the current location (x, y) of the agent.
Dirty/Clean Status: 11111 (top 5 squares dirty), 0000000000 (bottom 20 squares clean)
State S = (Dirty/Clean Status for Each Square, Agent’s Location (x, y))
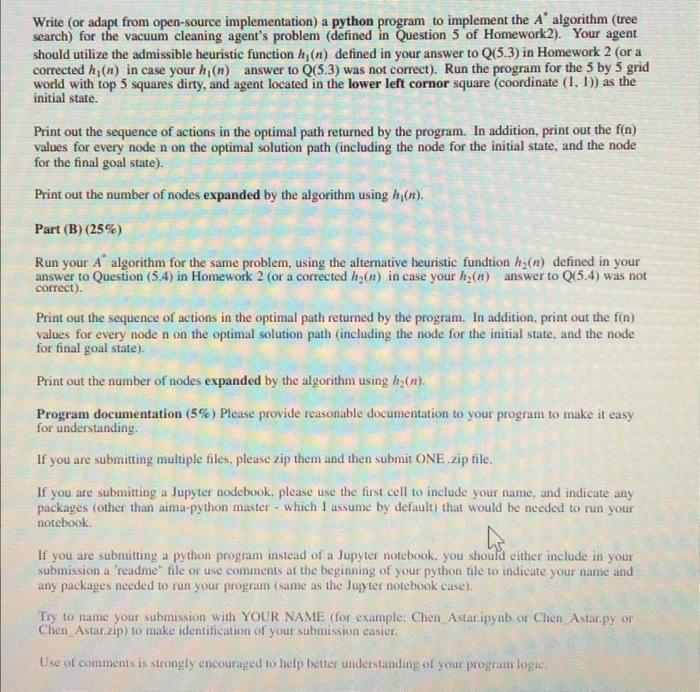
Write (or adapt from open-source implementation) a Python program to implement the A* algorithm (tree search) for the vacuum cleaning agent’s problem (defined in Question 5 of Homework 2). Your agent should utilize the admissible heuristic function h1(n) defined in your answer to Q(5.3) in Homework 2 (or a corrected h1(n) in case your h1(n) answer to Q(5.3) was not correct). Run the program for the 5 by 5 grid world with the top 5 squares dirty, and the agent located in the lower left corner square (coordinate (1, 1)) as the initial state. Print out the sequence of actions in the optimal path returned by the program. In addition, print out the f(n) values for every node n on the optimal solution path (including the node for the initial state and the node for the final goal state). Print out the number of nodes expanded by the algorithm using h1(n).
Part (B) (25%)
Run your A* algorithm for the same problem, using the alternative heuristic function h2(n) defined in your answer to Question (5,4) in Homework 2 (or a corrected h2(n) in case your h2(n) answer to Q(5.4) was not correct). Print out the sequence of actions in the optimal path returned by the program. In addition, print out the f(n) values for every node n on the optimal solution path (including the node for the initial state and the node for the final goal state). Print out the number of nodes expanded by the algorithm using h2(n).
Program documentation (5%)
Please provide reasonable documentation to your program to make it easy for understanding. If you are submitting multiple files, please zip them and then submit ONE .zip file. If you are submitting a Jupyter notebook, please use the first cell to include your name and indicate any packages (other than aima-python master – which I assume by default) that would be needed to run your notebook. If you are submitting a Python program instead of a Jupyter notebook, you should either include in your submission a ‘readme’ file or use comments at the beginning of your Python file to indicate your name and any packages needed to run your program (same as the Jupyter notebook case). Try to name your submission with YOUR NAME (for example: Chen_Astar.ipynb or Chen_Astar.py or Chen_Astar.zip) to make identification of your submission easier. Use of comments is strongly encouraged to help better understanding of your program logic.

![Title: Card Game Simulation using Stack and Deck Description: Create a program that simulates a simple card game using a stack and a deck of cards. The objective of the game is to implement basic card manipulation operations using stacks and to showcase the fundamental principles of a deck-based game. Suggested list of data structures: 1. Use a struct or class to store data about each card: struct Card { string suit; string rank; } 2. Use the following arrays or an alternative data structure for each of the following: a. Deck: An array to store the initially created deck of cards Card deck[52] b. Suits: An array to store the list of suits e.g., string suits[] = {"Hearts", "Diamonds", "Clubs", "Spades"} c. Ranks: An array to store the following ranks: string ranks[] = {"2", "3", "4", "5", "6", "7", "8","9","10","Jack","Queen","King", "Ace"} d. A stack to store the cards to be dealt. Struct cardsStack {} e. An array named hand that tracks 5 cards (handSize) given to the player. 3. You may also need to declare the following integer values: a. numberOfCards = 52 b. numberOfRanks = 13 c. numberOfSuits = 4 d. handSize = 5 Include the following functions: 1. Create an array of type Card, which holds a deck of standard playing cards (52 cards: 4 suits - hearts, diamonds, clubs, spades; each suit with cards 2 through 10, Jack, Queen, King, Ace). 2. Shuffle: randomly shuffle the deck of cards. 3. Store the cards in a stack using push. 4. DealCards: pop 5 cards from the deck of cards into an array of cards (hand) e.g., Hand[handSize] 5. Create a function to evaluate the user's hand by adding the corresponding values: The total value for a hand of 5 cards is between 11 and 69. 6. Generate a random number between 11 and 69 to represent the value of 5 cards played by the computer. 7. Compare the randomly generated value that represents the computer's score to the total value of cards held in the player's hand. The higher score wins. Output: 1. Print the deck of cards before shuffling 2. Print the deck of cards after shuffling 3. Print the player's hand and the randomly generated score for the computer 4. Evaluate and print the winner.](https://gotit-pro.com/wp-content/uploads/2023/10/ccd899b7-a388-49a5-aaa2-adf378ed1a05-300x397.png)
![How do you declare a variable for two-dimensional arrays? How do you create a two-dimensional array? How do you access elements in a two-dimensional array? This section will address these issues. 8.2.1 Declaring Variables of Two-Dimensional Arrays and Creating Two-Dimensional Arrays The syntax for declaring a two-dimensional array is as follows: elementType[][] arrayRefVar; or elementType arrayRefVar[][]; // Allowed, but not preferred As an example, here is how you would declare a two-dimensional array variable matrix of int values: int[][] matrix; or int matrix[][]; // This style is allowed, but not preferred You can create a two-dimensional array of 5-by-5 int values and assign it to matrix using this syntax: Figure 8.2 8.2.3 Ragged Arrays Each row in a two-dimensional array is itself an array. Thus, the rows can have different lengths. An array of this kind is known as a ragged array. Here is an example of creating a ragged array: 8.2-3 As you can see, triangleArray[0].length is 5, triangleArray[1].length is 4, triangleArray[2].length is 3, triangleArray[3].length is 2, and triangleArray[4].length is 1. If you don't know the values in a ragged array in advance, but do know the sizes-say, the same as in the preceding figure-you can create a ragged array using the following syntax: Two subscripts are used in a two-dimensional array: one for the row, and the other for the column. The two subscripts are conveniently called row index and column index. As in a one-dimensional array, the index for each subscript is of the int type and starts from 0, as shown in Figure 8.1a. row index column index Figure 8.1 The index of each subscript of a two-dimensional array is an int value, starting from 0. Figure 8.1 To assign the value 7 to a specific element at row index 2 and column index 1, as shown in Figure 8.1b, you can use the following syntax: A Caution It is a common mistake to use matrix[2,1] to access the element at row 2 and column 1. In Java, each subscript must be enclosed in a pair of square brackets. You can also use an array initializer to declare, create, and initialize a two-dimensional array. For example, the following code in (a) creates an array with the specified initial values, as shown in Figure 8.1c. This is equivalent to the code in (b). 8.2-2 8.2.2 Obtaining the Lengths of Two-Dimensional Arrays A two-dimensional array is actually an array in which each element is a one-dimensional array. The length of an array x is the number of elements in the array, which can be obtained using x.length. x[0], x[1], ..., and x[x.length - 1] are arrays. Their lengths can be obtained using x[0].length, x[1].length, ..., and x[x.length - 1].length. For example, suppose that x = new int[3][4], x[0], x[1], and x[2] are one-dimensional arrays and each contains four elements, as shown in Figure 8.2. x.length is 3, and x[0].length, x[1].length, and x[2].length are 4. Figure 8.2 A two-dimensional array is a one-dimensional array in which each element is another one-dimensional array. Ant: [[] z = langlahrazy - new int[5][]; triangleArray[3] = new int[2]; triangleArray[4] = new int[1]; You can now assign values to the array. For example, Note: The syntax new int[5][] for creating an array requires the first index to be specified. The syntax new int[][] would be wrong. Check Point: 8.2.1 Declare an array reference variable for a two-dimensional array of int values, create a 4by5 int matrix, and assign it to the variable. 8.2.2 Which of the following statements are valid? Ant: [] = new int[2]; int[] x = new int[]; int[][] y = new int[3][]; int[][] z = {{1, 2}}; int[][] w = {{1, 2}, {2, 3}}; int[][] v = { {1, 2}, {2, 3}};](https://gotit-pro.com/wp-content/uploads/2023/10/f06297d6-186a-4809-8104-7383e1be49f5-300x425.png)
John Ayad –
Very impressive work and way ahead of time! Thanks!
Felicia Schoenthal –
I am pleased for the assistance to get a answer to my questions. The service is prompt and provides good value to me.
Bob Salerno –
It was amazing work and in a very short time.
Connie Cannon –
Awesome work as usual!!